센서 구동 - SICK LMS511
on Achievement
이전 블로그에 있던 내용을 보강하여 작성됨. http://blog.naver.com/blastak/10120566333
사족
새로 접하는 것들을 포스팅하기에는 여러 가지 제약이 존재한다는 것을 알았다. 계속 포스팅을 하려고 노력했지만, 아래와 같은 이유로 미뤄왔다.
첫째, 내가 진행 중인 프로젝트에서 공개용 자료와 비공개용 자료를 딱 나누기가 어렵다는 점이다. 회사에서 진행하다 보니 여러 가지로 민감한 사항이 있어서 코드나 중요 자료 등이 많아 당분간 올리기는 어려울 것 같다.
둘째, 블로그 운영 목적 자체가 나만의 코드 저장소이며 정보 집합소이기 때문에 충분한 정리가 필요하다는 점이다. 대충해두면 항상 나중에 고생하는 것 같다.
예전 자료를 정리하면서 차츰 포스팅이 익숙해지기를 바란다.
LIDAR 란?
LIDAR[라이다]는 LIght Detection And Ranging 의 약자로써 RADAR[레이더]와는 빛을 이용한다는 점에서 차이를 갖는다1. 빛도 속도가 있으니까 이것을 이용해서 거리를 계산한다고 함. TOF를 사용하는 것. 자세한 내용은 생략한다.
SICK LMS511
이 글에서는
SICK LMS 511 PRO 20100구동에 필요한 최소한의 연결 방법만 설명한다. 사용하는 센서가 다를 경우 데이터 시트를 참고해서 전원 등을 연결하기 바란다.
Interface
LMS511 제품을 사용하기 전에 LMS291 제품을 먼저 사용했었다. 큰 차이점은 인터페이스 방식인데, 291은 COM port 기반의 시리얼 통신(serial communication)을 사용해야 하는 반면 511은 이더넷(Ethernet) 기반의 네트워크 소켓 (socket) 방식이다. 상대적으로 빠른 속도로 통신이 가능하므로 같은 시간당 더 많은 데이터를 받을 수 있다.
아래는 291과 511의 외형 비교이다. 센서는 좀 무거운 편이다.연구실의 가장 출입문 가까이에 앉았을 때 찍은 2011년 사진이다. 그땐 막내였다

아래 사진은 각각 511의 전원부와 통신부이다.

전원 케이블과 통신 케이블을 511 커넥터 소켓 부분에 꽂으면 된다. 아래 사진은 511의 커넥터 소켓이다.

Power On
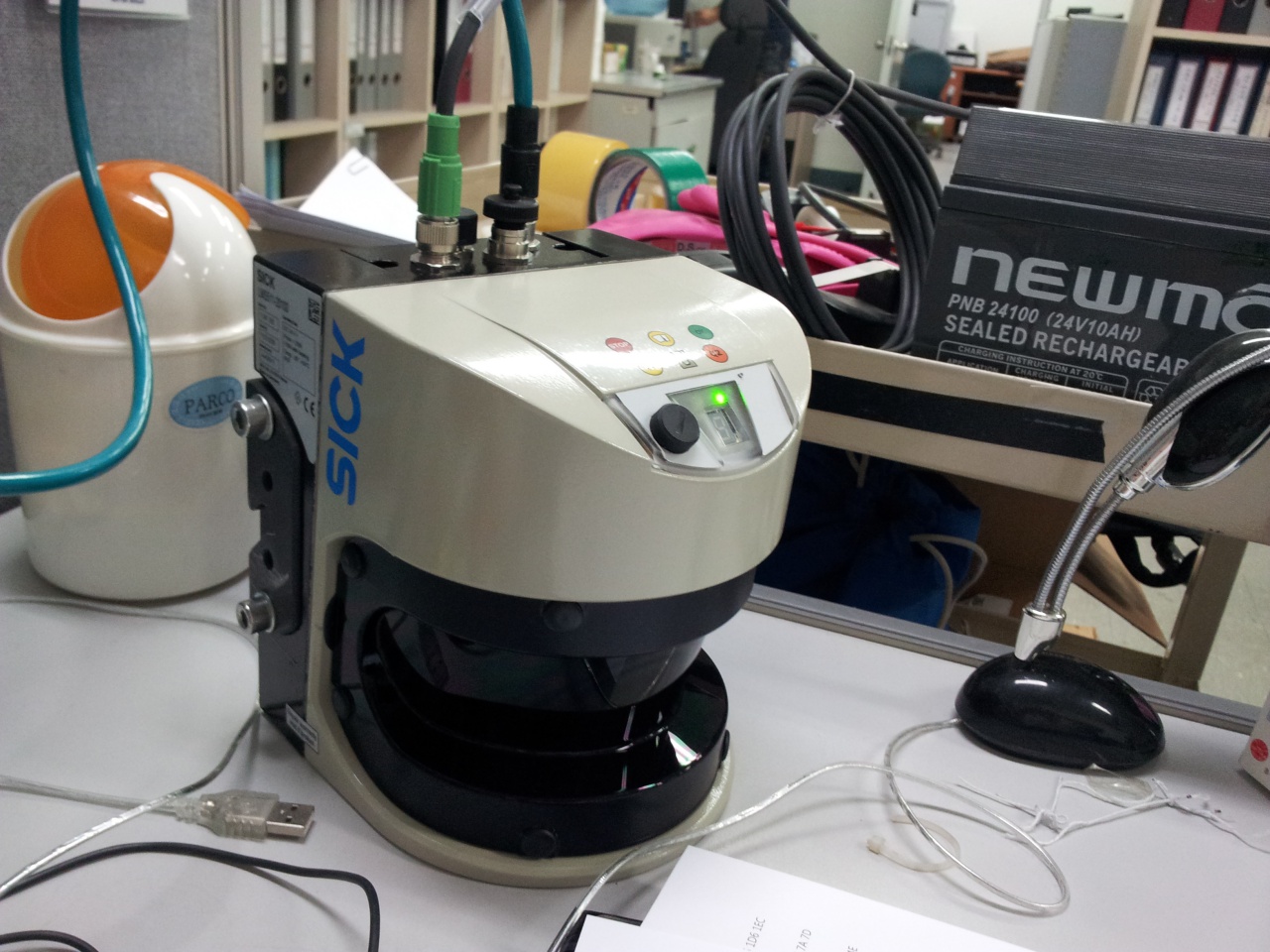
자 이제 배터리에 연결해서 전원을 켜보자. 갈색 선을 24V에, 파란 선을 GND에 연결하면 된다.
배터리나 어댑터 등 전원 소스에 연결하여 전원을 인가하면 모터 돌아가는 소리와 함께 부팅이 시작된다. 20~30초 후에 녹색 LED가 켜지면 정상 상태이고 바로 통신을 할 수 있는 상태이다. (간혹 주황색 LED인 경우가 있는데, 나중에 설명하겠지만 client로 접속되지 않은 경우이다.)
마치며
다음 글에서는 통신 방법과 구동 예제 프로그램에 대해 다룬다.